
Kategori
- FM-sändare
- 0-50w 50w-1000w 2kw-10kw 10kw +
- TV-sÄNDARE
- 0-50w 50-1kw 2kw-10kw
- FM-antenn
- TV-antenn
- antenn tillbehör
- Kabel kontakt ström~~POS=TRUNC Splitter konstlast
- RF Transistor
- Strömförsörjning
- ljud Utrustning
- DTV Front End Equipment
- länksystemet
- STL-system Microwave Link-systemet
- FM-radio
- Energimätare
- Andra produkter
- Special för Coronavirus
produkter Tags
Fmuser webbplatser
- es.fmuser.net
- it.fmuser.net
- fr.fmuser.net
- de.fmuser.net
- af.fmuser.net -> afrikanska
- sq.fmuser.net -> albanska
- ar.fmuser.net -> arabiska
- hy.fmuser.net -> Armenian
- az.fmuser.net -> Azerbajdzjanska
- eu.fmuser.net -> Baskiska
- be.fmuser.net -> vitryska
- bg.fmuser.net -> Bulgariska
- ca.fmuser.net -> katalanska
- zh-CN.fmuser.net -> Kinesiska (förenklad)
- zh-TW.fmuser.net -> Kinesiska (traditionella)
- hr.fmuser.net -> kroatiska
- cs.fmuser.net -> Tjeckiska
- da.fmuser.net -> danska
- nl.fmuser.net -> Dutch
- et.fmuser.net -> estniska
- tl.fmuser.net -> filippinska
- fi.fmuser.net -> finska
- fr.fmuser.net -> French
- gl.fmuser.net -> galiciska
- ka.fmuser.net -> Georgiska
- de.fmuser.net -> tyska
- el.fmuser.net -> Greek
- ht.fmuser.net -> Haitisk kreol
- iw.fmuser.net -> hebreiska
- hi.fmuser.net -> Hindi
- hu.fmuser.net -> ungerska
- is.fmuser.net -> isländska
- id.fmuser.net -> Indonesiska
- ga.fmuser.net -> Irländska
- it.fmuser.net -> Italian
- ja.fmuser.net -> japanska
- ko.fmuser.net -> koreanska
- lv.fmuser.net -> lettiska
- lt.fmuser.net -> Litauiska
- mk.fmuser.net -> makedonska
- ms.fmuser.net -> Malajiska
- mt.fmuser.net -> maltesiska
- no.fmuser.net -> Norwegian
- fa.fmuser.net -> persiska
- pl.fmuser.net -> polska
- pt.fmuser.net -> portugisiska
- ro.fmuser.net -> rumänska
- ru.fmuser.net -> ryska
- sr.fmuser.net -> serbiska
- sk.fmuser.net -> Slovakiska
- sl.fmuser.net -> Slovenska
- es.fmuser.net -> spanska
- sw.fmuser.net -> Swahili
- sv.fmuser.net -> svenska
- th.fmuser.net -> Thai
- tr.fmuser.net -> Turkiska
- uk.fmuser.net -> ukrainska
- ur.fmuser.net -> Urdu
- vi.fmuser.net -> Vietnamesiskt
- cy.fmuser.net -> Walesiska
- yi.fmuser.net -> Jiddisch
Skillnaden mellan absoluta och inkrementella kodare?
I den här artikeln kommer vi att diskutera de olika typerna av kodare och vilken kodare som kan användas för vilken funktion.
I en tidigare lektion diskuterade vi vad en kodare är och hur den kan implementeras i din applikation. I den här artikeln kommer vi att diskutera skillnaden mellan absoluta och inkrementella kodare och vilken som kan användas för vilken funktion.
Kodartyper och tekniker
Det finns många typer av kodare men de faller i princip i två huvudsakliga avkänningstekniker. De som är:
â € “Linjär
â € “Rotary
Inom dessa kategorier finns det olika kodningsmätningstyper som:
â € “Absolut
â € “Inkrementellt
Det finns också olika elektromekaniska tekniker som:
â € “Magnetisk
â € “Optisk
â € “induktiv
â € “Kapacitiv
â € “Laser
Det finns en mängd information om kodare och det kan tyckas svårt att svepa in huvudet.
Beskrivningar som roterande eller linjära, optiska och magnetiska, absoluta och inkrementella.
Vi berör några grunder för att hjälpa dig förstå vad som är vad och varför.
Låt oss först bryta ned dessa kategorier lite och förklara ett par av de många konfigurationerna.
1. Linjär kodare
Först använder Linear Encoder en givare för att mäta avståndet mellan två punkter. Dessa kodare kan använda en stång eller en kabel som körs mellan kodaromvandlaren och objektet som kommer att mätas för rörelse.
När objektet rör sig skapar givarens data som samlats in från stången eller kabeln en utsignal som är linjär mot objektets rörelse.
När avståndet mäts använder Linear Encoder denna information för att bestämma objektets position.
Ett exempel på där en linjär kodare kan användas är för en CNC-fräsmaskin där exakta rörelsemätningar krävs för noggrannhet vid tillverkningen.
Linjära kodare kan vara â € œAbsoluteâ € eller â € œInkrementellaâ €. Vi kommer att beröra absoluta och stegvisa mätningar lite senare i den här artikeln.
2. Roterande (axel) kodare
En roterande kodare samlar in data och ger feedback baserad på rotation av ett objekt eller med andra ord en roterande enhet.
Rotary Encoders kallas ibland â € œShaft Encodersâ €. Denna kodningstyp kan konvertera ett objekts vinkelläge eller rörelse baserat på axelns rotation, beroende på vilken mätningstyp som används.
â € œAbsolute Rotary Encodersâ € kan mäta â € œangularâ € positioner medan â € œIncremental Rotary Encodersâ € kan mäta saker som avstånd, hastighet och position.
Rotary Encoders används inom en mängd olika tillämpningsområden som datorinmatningsenheter som möss och spårbollar samt robotik.
Såsom tidigare angivits kan roterande eller axelkodare vara â € œAbsoluteâ € eller â € œInkrementellaâ €.
3. Positionskodare
Nästa kodare, som är en "Position" -kodare, används för att bestämma den mekaniska positionen för ett objekt. Den här mekaniska positionen är en ”absolut position”.
De kan också användas för att bestämma en förändring i position mellan kodaren och objektet också. Förändringen i position i förhållande till objektet och kodaren skulle vara en stegvis förändring.
Positionskodare används ofta i den industriella arenan för att avkänna positionen för verktyg och positionering med flera axlar.
Positionskodaren kan också vara absolut eller inkrementell.
4. Optisk kodare
"Optiska" kodare tolkar data i ljuspulser som sedan kan användas för att bestämma saker som position, riktning och hastighet.
Axeln roterar en skiva med ogenomskinliga segment som representerar ett visst mönster. Dessa kodare kan bestämma rörelsen hos ett objekt för "roterande" eller "axel" -applikationer medan de bestämmer exakt position i "linjära" funktioner.
Optiska kodare används i olika applikationer som skrivare, CNC-fräsmaskiner och robotik.
Återigen kan dessa kodare vara absoluta eller inkrementella.
Efter att ha förklarat huvudgrupperna kanske du ser ett mönster.
Alla kodare gör i princip samma sak, producerar en elektrisk signal som sedan kan översättas till position, hastighet, vinkel etc.
Absolut kodare kontra inkrementell kodare
Nu när vi har delat upp huvudgrupperna, låt oss diskutera skillnaden mellan absoluta och inkrementella mätningar.
För att diskutera skillnaden mellan absoluta och inkrementella mätningar kommer vi att använda rotationskodertypen som exempel.
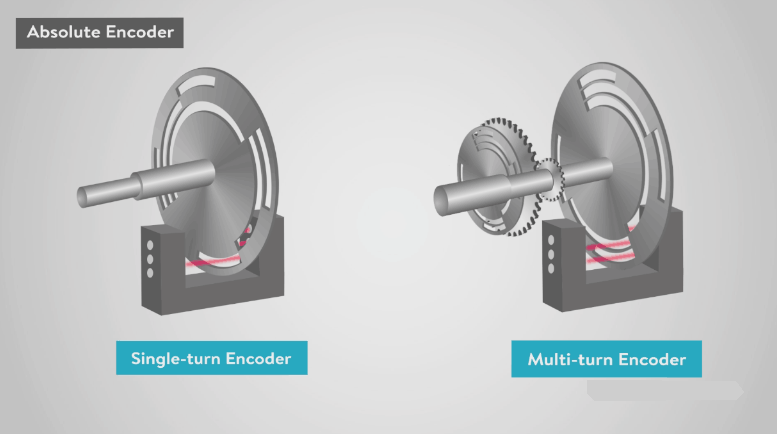
I en roterande "Absolute" mätartkodare används en slitsad skiva på en axel tillsammans med en stationär upphämtningsanordning. När axeln roterar produceras ett unikt kodmönster. Detta betyder att varje position på axeln har ett mönster och detta mönster används för att bestämma den exakta positionen.
Om strömmen till kodaren förlorades och axeln roterades, när kraften återupptas, kommer kodaren att registrera det absoluta läget, vilket visas av det unika mönstret som skickats av skivan och mottagits av pickupen.
Denna typ av mätning föredras i applikationer som kräver en stor grad av säkerhet, t.ex. när säkerhet är ett primärt problem. Eftersom kodaren alltid känner till sin slutgiltiga position baserat på det unika mönstret som produceras.
Absoluta mätkodare kan vara
- Envarv
or
- Flervarv
"Enkelsvarv" -kodare används för mätningar av kort avstånd medan "flervarv" skulle vara mer lämpad för längre avstånd och mer komplexa positionskrav.
För inkrementella måttkodare skapas utsignalen varje gång axeln roterar en uppmätt mängd. Den utsignalen tolkas sedan baserat på antalet signaler per varv.
Den inkrementella kodaren börjar räkna vid noll när den slås på. Till skillnad från den absoluta kodaren finns det inga skyddsåtgärder beträffande positionen.
Eftersom den inkrementella kodaren börjar räkna vid noll vid start eller strömavbrott, är det nödvändigt att bestämma en referenspunkt för alla uppgifter som kräver positionering.
Kodare i räkning av applikationer
I föregående artikel, när man beskriver användningen av en kodare för att räkna, är detta exempel ett bra exempel på en inkrementell kodare.
Antag att strömmen inte har störts och att du har slagit på transportören och placerat maskinen i inställningsläge.
När givaren vrids tar kontrollen emot räkningar. Låt oss säga att räkneområdet är 0 till 10000.
Detta är en inkrementell kodare så den absoluta positionen är inte känd, vi vet bara att en full revolution av axeln registrerar ett räknat antal 10000.
Vi kommer att placera föremålet på transportören och så snart som ingångssensorns sensor upptäcker objektet fångas det aktuella kodarantalet. Låt oss säga att numret är 5232.
Vi kommer sedan att fånga räkningen med objektet som kommer ut och upptäcks av utgångsfotoögat. Vi säger att antalet är 6311. Så för att bestämma räkningen för hela resan, kommer vi att subtrahera 5232 från 6311 och fastställa att objektets resa är 1079 räkningar.
Med detta exempel är det uppenbart att vi inte känner till objektets absoluta placering, vi vet bara att reseantalet från ingången till utgången är 1079.
Det säger inte att objektet ligger tre tum från utgången, bara in, etc.
vi vet bara att objektet kommer in, en räkning kommer att fångas och objektet kommer att gå ut och igen, det räknade fångas.
I händelse av att vi inte såg objektet som kommer ut inom det tillåtna körantalet, plus eller minus ett dödband, kommer maskinen att fel och processen kommer att stanna.
Det finns många, många kodningsvarianter där ute och vi kan fortsätta i timmar om de olika typerna.
Förhoppningsvis har vi gett dig en grundläggande förståelse för vad som finns ute och när du kanske vill välja en viss typ framför den andra.
